Koska tiedämme, ettei kaikissa autoissa ole pysäköintiantureita. Jos haluamme asentaa ulkoisen pysäköintianturin, se maksaa paljon rahaa. Mutta onneksi voimme tehdä edullisen pysäköintianturin käyttämällä Arduinoa.

Pysäköintianturi (kopioitu Instructablesista)
Tässä projektissa kuljettajalle ilmoitetaan summerin äänimerkillä, kun pysäköinti peruutetaan. Pieni ultraäänianturi kiinnitetään takarekisterikilven yläpuolelle, joka laskee auton etäisyyden takana olevasta kohteesta. Jos etäisyys pienenee tietyllä alueella, se antaa äänimerkin ja ilmoittaa kuljettajalle, milloin lopettaa.
Kuinka asettaa pysäköintianturi autoon?
Siirrytään nyt eteenpäin ja kerätään lisätietoja aloittaaksemme projektimme.
Vaihe 1: Kerää komponentit
Ennen kuin aloitamme tämän projektin parissa työskentelyn, on aina hyvä tehdä luettelo käytetyistä komponenteista ja tutkia niitä. Joten alla ovat komponentit, joita aiomme käyttää tässä projektissa.
- Arduino UNO
- HC-SR04-kortti (ultraäänianturi)
- Leipälauta
- Uros- ja naarasjohdinjohdot
- 3V summeri
- Liitäntäjohto (noin 4 metriä)
- Pieni muovilaatikko
Vaihe 2: Komponenttien tutkiminen
Nyt kaikki tässä projektissa käytettävät komponentit ovat tunnettuja, tutkitaan niitä vähän, jotta tiedämme kuinka nämä asiat toimivat.
Arduino Uno on mikrokontrollerikortti, jota käytetään suorittamaan erilaisia tehtäviä eri piireissä. Se tarvitsee toimiakseen C-kielen koodin. Käytämme Arduino Uno -taulua tässä projektissa, mutta voit käyttää myös Arduino Nanoa tai Node MCU: ta.
HC-SR04-kortti on ultraäänianturi, jota käytetään kahden kohteen välisen etäisyyden määrittämiseen. Se koostuu lähettimestä ja vastaanottimesta. Lähetin muuntaa sähköisen signaalin ultraäänisignaaliksi ja vastaanotin muuntaa ultraäänisignaalin takaisin sähköiseksi signaaliksi. Kun lähetin lähettää ultraääniaallon, se heijastuu takaisin törmätessään tiettyyn esineeseen. Etäisyys lasketaan käyttämällä aikaa, jonka ultraäänisignaali menee lähettimestä ja palaa vastaanottimeen.

Ultraäänianturi
Vaihe 3: Piirin tekeminen
Nyt kun tiedämme komponenttien toiminnan, jatketaan ja kootaan nämä komponentit yhteen ja tehdään piiri alla olevan kuvan mukaisesti. Ultraäänianturi saa virtansa 5 V: n kautta Arduinon kautta, sen liipaisintappi on kytketty Pin5: ään ja Echo-nasta on kytketty Arduinon Pin6: een. Summeri on kytketty Arduinon Pin4: ään.

Piirikaavio
Nyt asetamme nämä komponentit autooni. Kiinnitä HC-SR04-moduuli rekisterikilven yläpuolelle ja tee tapa yhdistää johdot auton hatchbackin läpi auton takaosaan, lähellä kaiuttimia. Aseta loput piiristä pieneen muovilaatikkoon ja aseta se auton takaosaan kaiuttimien lähelle. Ota nyt pieni pala liitäntäjohtoa ja liitä Arduinon Vin-nasta kaiuttimen positiiviseen napaan.
Vaihe 4: Arduinon käytön aloittaminen
Jos et ole vielä perehtynyt Arduino IDE: hen, älä huoli, koska tässä on menettely koodin polttamiseksi Arduinolle IDE: n avulla. Lataa ensin Arduino IDE: n uusin versio osoitteesta Arduino
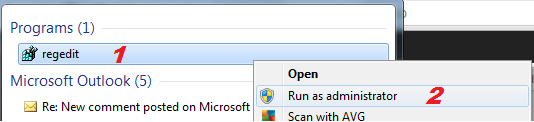
- Liitä Arduino-kortti kannettavaan tietokoneeseen. Valitse Ohjauspaneeli> Laitteisto ja äänet> Laitteet ja tulostimet tarkistaaksesi portin nimen, johon Arduino on kytketty.
- Avaa Arduino IDE ja siirry kohtaan Työkalut> Taulut. Aseta kortti asentoon Arduino / Genuino UNO.
- Valitse Työkalut> Portti ja määritä ohjauspaneelissa näkemäsi porttinumero.
- Lataa alla oleva koodi ja kopioi se IDE: hen. Napsauta Lähetä-painiketta polttaaksesi koodin mikro-ohjainkortillesi.
Klikkaus tässä ladata koodi.
Vaihe 5: Koodi
Koodi on hyvin yksinkertainen, mutta se selitetään alla.
1). Kaikki käytettävät Arduinon nastat alustetaan alussa.
const int trigPin = 11; const int echoPin = 10; const int buzzPin = 6; pitkä kesto; kellun etäisyys;
2). void setup () on funktio, joka määrittää Arduinon nastat käytettäväksi INPUt tai OUTPUT. Se asettaa myös siirtonopeuden, joka on mikro-ohjainkortin tiedonsiirtonopeus.
void setup () {Sarja.alku (9600); pinMode (trigPin, OUTPUT); pinMode (echoPin, INPUT); pinMode (buzzPin, OUTPUT); }3). void loop () on toiminto, joka toimii jatkuvasti jaksossa. Tässä silmukassa lähetetään ultraäänisignaali ja etäisyys lasketaan käyttämällä matkan kestoa. Jos etäisyys on alle 100 cm, summeri antaa äänimerkin.
void loop () {digitalWrite (trigPin, LOW); viive mikrosekuntia (2); digitalWrite (trigPin, HIGH); viive mikrosekuntia (10); digitalWrite (trigPin, LOW); kesto = pulssi (echoPin, HIGH); etäisyys = 0,034 * (kesto / 2); jos (etäisyys< 100) { digitalWrite(buzzPin,HIGH); } else { digitalWrite(buzzPin,LOW); } delay(300); }Tämä oli koko menettely, jolla tehtiin edullinen ja tehokas pysäköintianturi autollesi. Nyt voit nauttia oman pysäköintianturin valmistamisesta kotona.