Katurikollisuus on hyvin yleistä modernilla vuosisadalla. Kaikkien tulee tuntea olonsa turvalliseksi ollessaan kotona joko yöllä tai päivällä. Joten monet turvahälytysjärjestelmät ovat saatavilla markkinoilla. Nämä järjestelmät ovat erittäin tehokkaita, mutta kalliita. A murtovaras hälytys tai tunkeilijan hälytys on periaatteessa elektroninen laite, joka antaa hälytyksen havaitessaan tunkeilijan kotona. Voimme tehdä tunkeilijan hälytyspiirin kotona, joka on melkein yhtä tehokas tietyllä etäisyydellä ja on erittäin alhainen.

Turvahälytys
Tämä artikkeli kertoo tunkeilijahälytyksen tekemisestä Arduino- ja PIR-antureilla. Kun PIR-anturi havaitsee tunkeilijan, se lähettää signaalin Arduinolle ja Arduino antaa hälytyksen. Tämä piiri on hyvin yksinkertainen ja se suunnitellaan Veroboardille. Tämä Veroboard asennetaan talon siihen paikkaan, jossa tunkeilijan on suurempi vaara päästä kotiin.
Kuinka suunnitella PIR-anturiin perustuva tunkeilijahälytys?
Paras tapa aloittaa projekti on laatia luettelo komponenteista ja käydä läpi lyhyt tutkimus näistä komponenteista, koska kukaan ei halua pysyä keskellä projektia vain puuttuvan komponentin takia. Laaditaan luettelo komponenteista, ostetaan ne ja aloitetaan projekti. Vero-kortti on suositeltava piirin kokoamiseksi laitteistolle, koska jos koomme komponentit leipälaudalle, ne voivat irrota siitä ja piiri muuttuu lyhyeksi, joten Veroboard on edullinen.
Vaihe 1: Komponenttien kerääminen (laitteisto)
- 10 k ohmin vastus
- LED
- Summeri
- 9 V: n akku
- 9 V: n akkuklipsi
- Veroboard
- Johtojen liittäminen
- Digitaalinen yleismittari
Vaihe 2: Tarvittavat komponentit (ohjelmisto)
- Proteus 8 Professional (voidaan ladata osoitteesta Tässä )
Kun olet ladannut Proteus 8 Professional, suunnittele piiri siihen. Olen sisällyttänyt tähän ohjelmistosimulaatiot, jotta aloittelijoille voi olla kätevää suunnitella piiri ja tehdä asianmukaiset yhteydet laitteistoon.
Vaihe 3: Piirin toiminta
Tämän piirin toiminta on hyvin yksinkertaista. Aluksi PIR-anturin tila asetetaan LOW-tilaan. se tarkoittaa, että liikettä ei havaita. Kun PIR-anturi havaitsee liikkeen, se lähettää signaalin mikro-ohjaimelle. Mikrokontrolleri kytkee sitten summerin ja LEDin päälle. Jos liikettä ei havaita, LED ja summeri pysyvät pois päältä.
Vaihe 4: Komponenttien kokoaminen
Nyt kun tiedämme projektin pääyhteydet ja myös koko piirin, edetään ja aloitetaan projektin laitteiston valmistus. Yksi asia on pidettävä mielessä, että piirin on oltava kompakti ja komponentit on asetettava niin lähelle.
- Ota Veroboard ja hiero sen sivua kuparipinnoitteella kaapimella.
- Aseta komponentit nyt varovasti ja riittävän lähelle, jotta piirin koko ei tule kovin suureksi
- Ota kaksi kappaletta Naarasotsikoita ja aseta se Veroboardille siten, että niiden välisen etäisyyden tulisi olla yhtä suuri kuin Arduino nanolevyn leveys. Asennamme myöhemmin Arduino-nanolevyn näihin naispuolisiin otsikoihin.
- Tee liitännät varovasti juotosraudalla. Jos liitäntöjen tekemisessä tehdään virhe, yritä tyhjentää yhteys ja juottaa yhteys uudelleen kunnolla, mutta lopulta yhteyden on oltava tiukka.
- Kun kaikki liitännät on tehty, suorita jatkuvuustesti. Elektroniikassa jatkuvuustesti on sähköpiirin tarkistus sen tarkistamiseksi, virtaako virta halutulla tiellä (että se on varmasti kokonaispiiri). Jatkuvuustesti suoritetaan asettamalla pieni jännite (johdotettu järjestyksessä LED: n tai hälinän muodostavan osan, esimerkiksi pietsosähköisen kaiuttimen kanssa) valitsemallaan tavalla.
- Jos jatkuvuustesti läpäisee, se tarkoittaa, että piiri on muodostettu riittävästi halutulla tavalla. Se on nyt valmis testattavaksi.
- Liitä akku piiriin.
Tarkista nyt kaikki liitännät katsomalla alla olevaa kytkentäkaaviota:

Piirikaavio
Vaihe 5: Arduinon käytön aloittaminen
Jos et ole vielä perehtynyt Arduino IDE -ohjelmaan, älä huoli, koska alla on selitetty vaiheittainen menettely Arduino IDE: n asettamiseksi ja käyttämiseksi mikrokontrollerikortin kanssa.
- Lataa uusin Arduino IDE -versio osoitteesta Arduino.
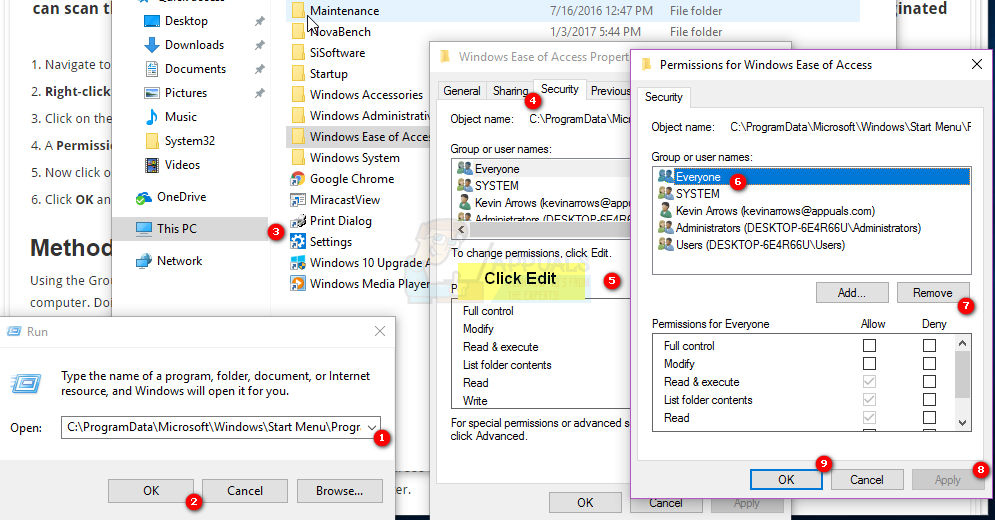
- Liitä Arduino Nano -kortti kannettavaan tietokoneeseen ja avaa ohjauspaneeli. Napsauta ohjauspaneelissa Laitteisto ja ääni . Napsauta nyt Laitteet ja tulostimet. Täältä löydät portin, johon mikrokontrollerikortti on kytketty. Minun tapauksessani se on COM14 mutta se on erilainen eri tietokoneissa.
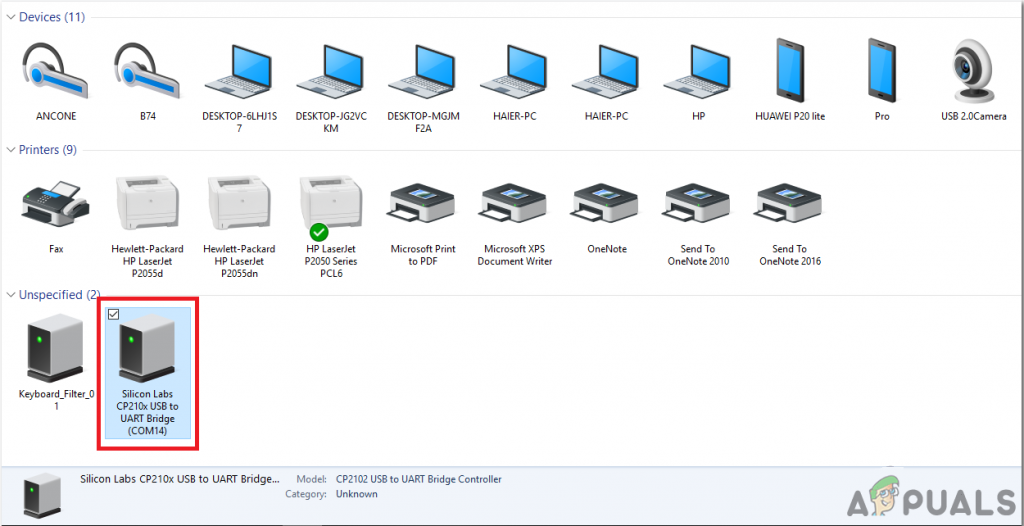
Portin löytäminen
- Napsauta Työkalut-valikkoa. ja aseta lauta asentoon Arduino Nano avattavasta valikosta.
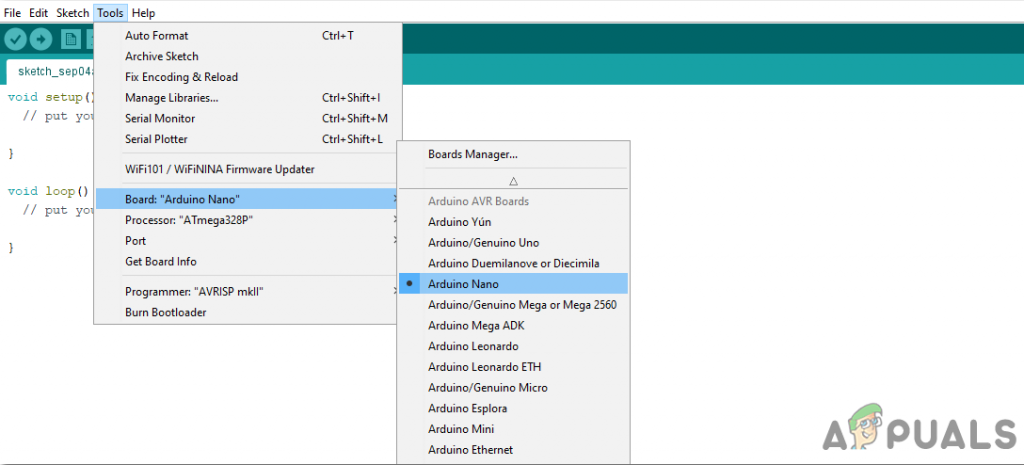
Asennuslauta
- Määritä samassa Työkalu-valikossa portiksi sen portin numero, jonka olet havainnut aiemmin Laitteet ja tulostimet .
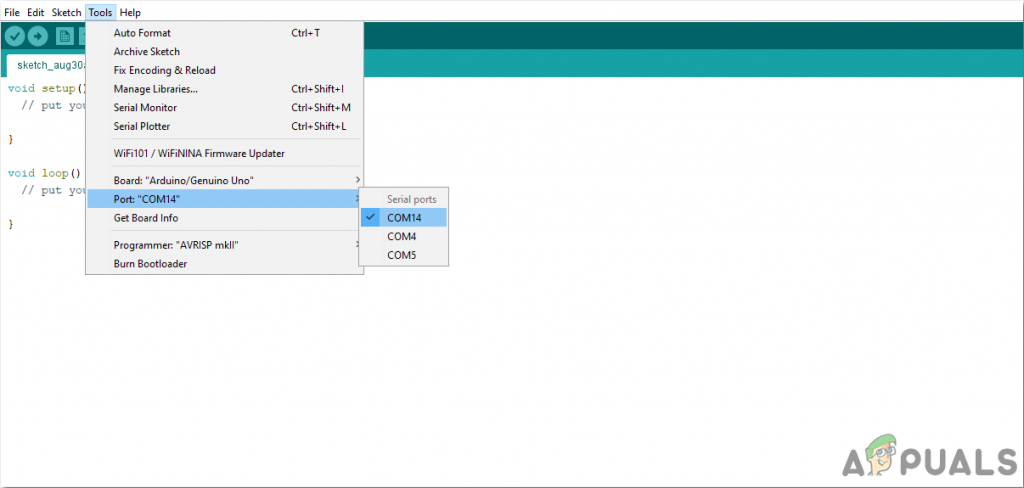
Portin asettaminen
- Aseta samassa Työkalu-valikossa Suoritin kohtaan ATmega328P (vanha käynnistyslatain).
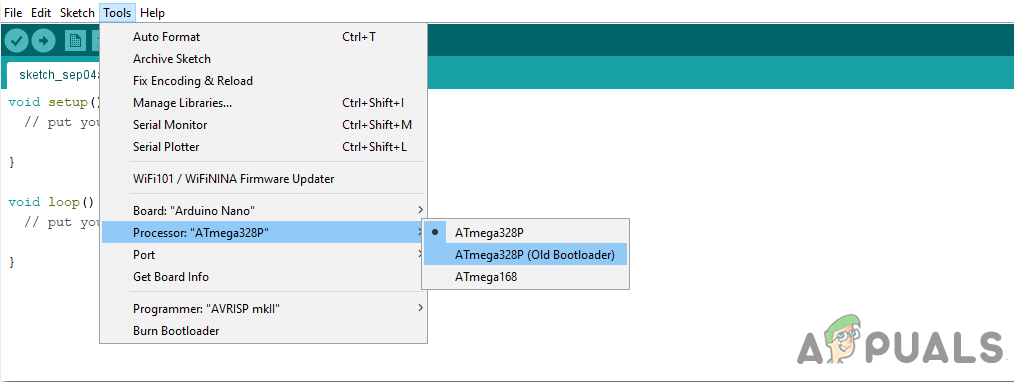
Suoritin
- Lataa alla oleva koodi ja liitä se Arduino IDE -laitteeseesi. Klikkaa lataa -painiketta polttaaksesi koodin mikro-ohjainkortillesi.
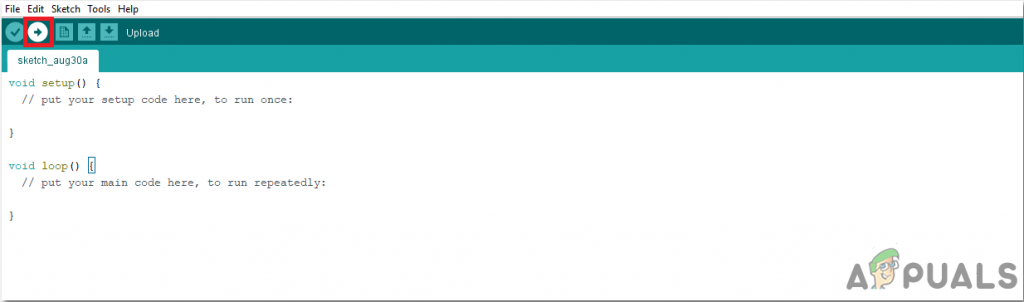
Lähetä





Lataa koodi Klikkaa tästä.
Vaihe 6: Koodin ymmärtäminen
Tämän projektin koodi on melko hyvin kommentoitu ja erittäin helppo ymmärtää. Mutta silti se selitetään lyhyesti alla.
1. Alussa alustetaan Arduinon nastat, jotka liitetään myöhemmin LEDiin ja summeriin. Ilmoitetaan myös muuttuja, joka tallentaa joitain arvoja ajon aikana. Sitten PIR: n alkutilaksi asetetaan LOW, mikä tarkoittaa, että sanotaan, ettei liikettä havaita alun perin.
int ledPin = 5; // valitse tappi LED int-summerille = 6; // valitse tappi summerimerkille int inputPin = 2; // valitse tulotappi (PIR-anturille) int pirState = LOW; // aloitamme olettaen, ettei liikettä havaittu int val = 0; // muuttuja pin-tilan lukemiseen ja tallentamiseen jatkokäyttöä varten
2. void setup () on toiminto, jossa alustamme Arduino-kortin nastat käytettäväksi INPUT tai OUTPUT. Siirtonopeus on asetettu myös tähän toimintoon. Siirtonopeus on bittiä sekunnissa, jolla mikro-ohjain kommunikoi ulkoisten laitteiden kanssa.
void setup () {pinMode (ledPin, OUTPUT); // julistaa LED: n lähtöliitäntätilaksi (summeri, OUTPUT); // julista summeri lähtötilaksi pinMode (inputPin, INPUT); // ilmoita anturi tuloksi Serial.begin (9600); // aseta siirtonopeus 9600}3. void loop () on toiminto, joka toimii yhä uudestaan silmukassa. Tässä toiminnossa mikro-ohjain on ohjelmoitu, joten jos se havaitsee liikkeen, se lähettää signaalin summerille ja LEDille ja kytkee ne päälle. Jos liikettä ei havaita, se ei tee mitään.
void loop () {val = digitalRead (inputPin); // lue tuloarvo PIR-anturista, jos (val == KORKEA) // Jos liike havaitaan ennen {digitalWrite (ledPin, HIGH); // kytke LED päälle digitalwrite (summeri, 1); // Kytke summeri päälle viive (5000); // luo viiden sekunnin viive, jos (pirState == LOW) {// jos tila on alun perin alhainen, tarkoittaa, että liikettä ei havaittu ennen // olemme juuri ottaneet käyttöön Serial.println ('Liiketunnistettu!'); // Tulosta oon sarjamonitori, että liike on havaittu pirState = HIGH; // pirState on asetettu arvoon HIGH}} else {digitalWrite (ledPin, LOW); // kytke LED pois päältä digitalWrite (summeri, 0); // kytke summeri pois päältä, jos (pirState == KORKEA) {// jos tila on KORKEA aluksi, tarkoittaa, että jokin liike havaittiin ennen // olemme juuri sammuttaneet Serial.println ('liike päättyi!'); // Tulosta sarjavalvontaan, että liikkeellä on loppu pirState = LOW; // pirState-asetuksena on LOW}}}Joten tämä oli koko menettely turvahälytyspiirin tekemiseksi kotona PIR-anturin avulla. Voit nyt aloittaa työskentelyn ja tehdä oman edullisen ja tehokkaan turvahälytyksen.